
�Ԅ��{�g�Ŀ����M�����l�ˏV���Pע����������������·��ȫ�Ժͽ�ͨЧ�ʷ��档Ȼ�����S�����g���ռ����{��О�İ�ȫ�O�܆��}�����@�����Ԅ��{�����У���ȫ����T���{�T�����О�ֱ��Ӱ푵���܇��ȫ���O�����О錦���¹�؟�εĴ_�����P��Ҫ�����ˑ����@һ������ȫϢ(NASDAQ: HOLO)�_�l��һ�N���ڶ�ģ�B�����J�C���Ԅ��{���űO�ܷ�ʽ��TSPAD����ּ��������ȌW���c�^�K朼��g�����F��Ч����ȫ�������{��О�O�ܡ�
Ŀǰ���ИI��ȱ��һ���������������P�ߏV�����ܵĶ����u���������O���{��О顣�ڂ��y�ıO��ϵ�y�У��{��О���u��������ه��ҕ�l�O���c�˹��������Ⱥĕr�����a���`����������ȌW�����g���M��ʹ�î����О�z�y���Ԅӻ��ɞ���ܡ��҂�ͨ�^�Y����ȌW���c�^�K朼��g�������һ�N���µıO�ܷ�ʽ���܉����Ԅ��{�������ṩ������ŵ��О��u����
���������ȌW�����g�ڈD��̎���͕r�g���з����I��ȡ�����@��ͻ�ƣ�ʹ���Ԅәz�y�{���О�ɞ���ܡ�ͨ�^Ӗ����ȌW��ģ�ͣ��҂��܉r��������ҕ�l�������R�e�������О飬��߱O�صľ����cЧ�ʡ��Ԅ��{�İ�ȫ�O����Ҫ�C�Ͽ��]��N����Դ������ҕ�l�O�ء��������������{�T�О�ȡ���ˣ������Ч���Ϻ��J�C��ģ�B�������ɞ�_���O����Ч�Ե��P�I���҂����о�ּ���_�lһ�N�·f�ıO�ܷ�ʽ��������ȌW���c�^�K朵ĽY�ϣ����F��Ч�����ŵ��{��О�O�ܡ�
�^�K朼��g����һ�Nȥ���Ļ������ɴ۸ĵķֲ�ʽ�~�����ṩ�˔�����ȫ�c�������Ľ�Q���������Ԅ��{�O���У��^�K朿������ڴ惦�P�I�ıO�ؔ������_���������挍�ԺͿ����ԣ����¹�؟�εĴ_���ṩ�ɿ��C����
��ȫϢ(NASDAQ: HOLO)���ڶ�ģ�B�����J�C���Ԅ��{���űO�ܷ�ʽ��TSPAD�����Ԅ��{��ИI�����˄��µıO�ܽ�Q������ͨ�^�Y����ȌW���c�^�K朼��g�����H������{��О�z�y�Ĝʴ_�Ժ�Ч�ʣ�Ҳ���¹�؟���ж��ṩ�˿ɿ����C�����A��
ԓģ�͵ĺ�����һ�������P�I�����m���x�����ȌW����ܣ��܉r�z�y�{��^���еĮ����О顣���w���ԣ���ȫϢ�����˾��e�W�j��CNN�����L����ӛ���W�j��LSTM���ĽY�ϣ����������r�g���Д���������������ģ��ͨ�^�����{�ҕ�l�����Ԅ��R�e���P�I�������ڴ˻��A���M�Ю����О�������u����
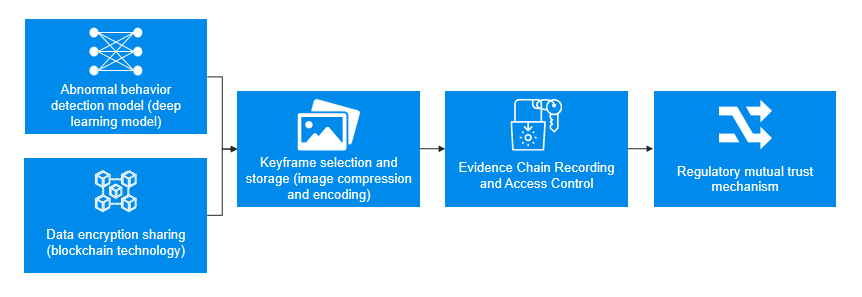
���{��О�O�y�У����Ў��Ĕ���������̎��Ч�ʵ��¡���ˣ���ȫϢ��ģ������ͨ�^��ҕ�l�����Ď���ȡ���Ԅ��x����������P�I�����@Щ���܉���Ч��ӳ�{��О�����c���P�I�����x����ڶ�N���أ������\��ģʽ���ٶ�׃������߅�h����������ȌW��ģ�ͣ��܉��R�e���缱�x܇���������١������{�Ȳ���ȫ�О顣�@Щ�О�һ�����z�y����ϵ�y�������l������ӛ����P�����Ԃ���m������
�ڔ����惦�c�������棬�^�K朼��g�ṩ��һ�Nȥ���Ļ��ҷ��۸ĵĽ�Q������ͨ�^�^�K朣����бO�ؔ������ܰ�ȫ�ش惦������O�ܙC��������ƽ�_����I�ṩ������Ϣ��������ȫϢ��ϵ�y���Ô������ܼ��g�����P�I����������Y���惦�څ^�K��ϣ��_�������ڂ�ݔ�ʹ惦�^���еİ�ȫ�ԡ�ͬ�r��ͨ�^���ܺϼs���_���������L������ʹ��Ҏ�t������δ�ڙ��L���͔����۸ġ�
���˴_�������Ŀɿ��ԣ���ȫϢ�OӋ��һ�N�C���惦�C�ƣ����н��^��C�Į����О�z�y�Y������ӛ��څ^�K��ϣ��γɲ��ɴ۸ĵ��C��朡��ڰl���¹ʕr�����P������ͨ�^�^�K��ϵĔ��������٫@ȡ�¼����挍��r����؟���ж��ṩ����֧�֡�
�ڶ�����������^���У���Ϣ���cЧ��֮�g��ƽ�����P��Ҫ��ͨ�^�P�I���x��͈D�s���a���g���p�ٔ�����ݔ����ͬ�r�����C�˔������������c��Ч�ԡ��@�N�������H����˔���̎����Ч�ʣ�߀�_���˱O�ܲ��T�܉r�@ȡ���P�I��Ϣ��
��ȫϢ(NASDAQ: HOLO)TSPAD��ʽ���OӋ߀���]���˱O�ܙC���c��I֮�g�Ļ��řC�ơ�ͨ�^�^�K朵����ԺͿ����ԣ��������{��^���еıO���c�����܉���Ӹ�Ч���O�ܲ��T���Ԍ��r�O���{��О飬����ƽ�_�܉r�{���\ݔ���ţ�����I�t���ڱ��ϰ�ȫ��ǰ���������\�IЧ�ʡ�
��ȫϢ���ڶ�ģ�B�����J�C���Ԅ��{���űO�ܷ�ʽ��TSPAD���������Ԅ��{ȫ���ṩ�˄��µĽ�Q������ͨ�^��ȌW��ģ�͵Č��r�����О�z�y�ͅ^�K朼��g�Ĕ�����ȫ�惦��ԓϵ�y�܉��Ч���ʴ_�رO���{��О飬�_���¹�؟�ε����ݡ�








